| >>> | Деформатор |
|||||||
| >>> | Конструктор | >>> | Системы деформации | |||||
| >>> | Детали | >>> | Системы фиксации | |||||
| >>> | Датчики | >>> | Центр загрузки | |||||
| >>> | Механика | >>> | Логические игры | |||||
| >>> | Модули | >>> | Библиотека | |||||
| >>> | Сборки узлов | >>> | Реквизиты |
Механика |
||||||
| Зубчатые колеса |
 |
Облегченные зубчатые колеса. № 12, 16, 24, 32, 48 Толщина - 2 мм. При необходимости передачи существенного крутящего момента колеса рекомендуется сдвоить. |
720 руб./комплект |
|||
| Зубчатая пара | 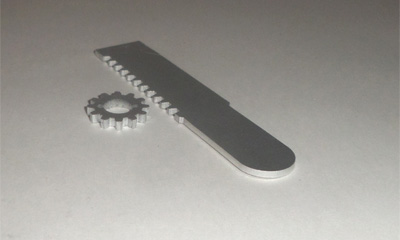 |
Зубчатая пара (колесо + рейка) для механизмов линейных перемещений. Используется совместно с сервоприводом. |
120 руб. | |||
| Линейный актуатор | 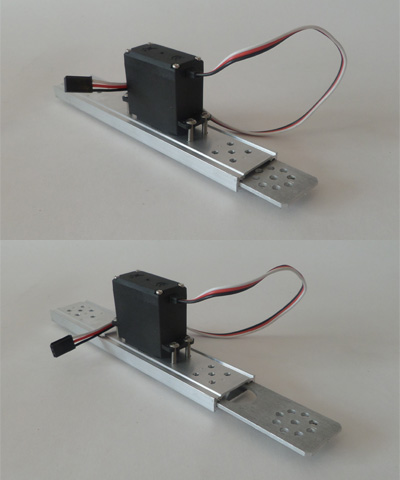 |
Ход штока: 27 мм |
840 руб. | |||
| RA 1 | Робо-рука (захват) | 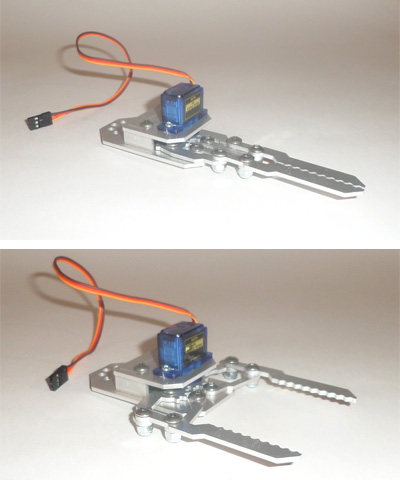 |
Захват, max: 54 мм Обозначение проводов сервопривода: |
680 руб. | ||
| RA 3 | Робо-рука (захват) | 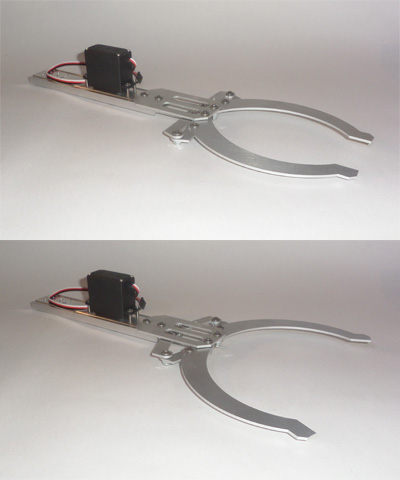 |
328 х 120 х 50 мм Характеристики сервопривода: Рабочее напряжение: 4.8 - 6 В |
870 руб. | ||
| RA4 | Робо-рука (захват) | 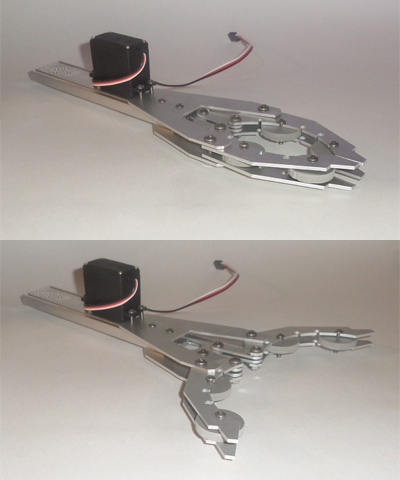 |
Захват модернизируемый. Можно добавлять к пальцам различные элементы, например резиновые втулки. 288 х 68 х 50 мм Характеристики сервопривода: Рабочее напряжение: 4.8 - 6 V |
890 руб. | ||
| RA 5 | Робо-рука (захват) |  |
252 х 58 х 90 мм Характеристики сервопривода: Рабочее напряжение: 4.8 - 6 V |
940 руб. | ||
| RA 10 | Робо-рука (захват) |  |
270 х 72 х 68 мм Характеристики сервопривода: Рабочее напряжение: 4.8 - 6 V |
920 руб. | ||
| Модуль "серво-блок" |  |
310 руб. | ||||
| Модуль "рычаг" |  |
440 руб. | ||||
| Модуль "плечо" |  |
440 руб. | ||||
| Конструктор колес |  |
760 руб. | ||||
| Моно-колесо |  |
154 руб. | ||||
| (с) ООО "МВ Кубиков", 2018 | г. Новосибирск |
|||||||